two-pronged-robot.fsmHi Everyone,
I have a two pronged robot where:
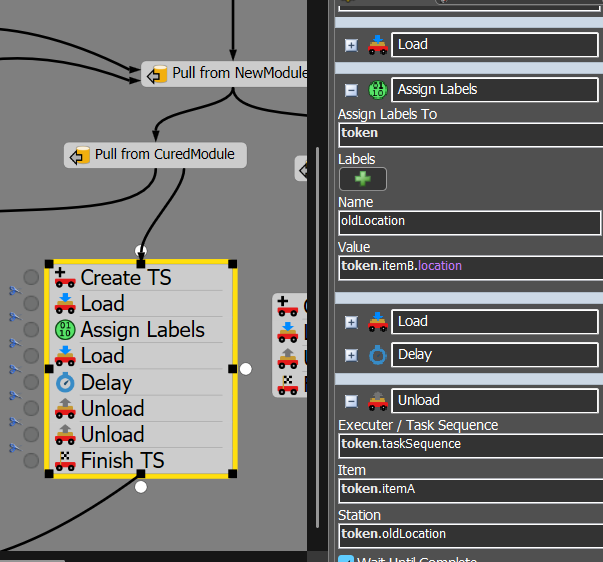
1. robot loads ItemA from input conveyor
2. robot loads ItemB from one of eight queues
3. robot unloads ItemA into the same queue ItemB was in
4. robot unloads ItemB into output conveyor
I'm having problem getting step 3 to work with token.ItemB.location. I suspect the location has changed after loading itemB, but I'm not sure. FlexSim newbie here. Appreciate any help. Attached sample file.
Regards,
Ilyas